






Friction between tyres and the ground on a car will reduce speed, make noise, waste energy. If number of tyres touch the ground is reduced on a car, the car will travel much fast, make less noice and use less energy.
Instead of using expensive and complex gyroscopic balancing system, this design uses a much simple centre of gravity movement system to make sure the car is parallel to the ground (centre of gravity of the car is on two parallel wheels).
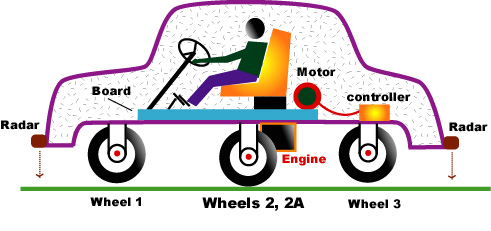
There are one front wheel 1, two meddle parallel wheels (2, 2A), one back wheel 3 on the car (see pictures). When the car is parallel to the ground, only wheels (2, 2A) touch the ground, wheel 1 and wheel 3 will be left from the ground. Wheels (1, 3) are kind of caster wheels. Wheels (2, 2A) are powered by car engine to run the car. Driver and passengers sit on a board which can be moved forward or backward on chassis by an electric motor. Wheels (2, 2A) are controlled by steering wheel to change direction of the car. The electric motor is controlled by computerized controller.
The computerized controller connects to two sense radars. Sense radar 1 is installed in front of the car. Sense radar 2 is installed at back of the car. The sense radars detect the distance between them and the ground. As the signals from the sense radars are received by computerized controller, the controller will process the signals, and order the motor to move the board (backward or forward), to make sure the car is parallel to the ground. In other words, the distance between both sense radars (1, 2) and the ground should be same. In this case, the car is running on two wheels (2, 2A), centre of gravity of the car is on two wheels (2, 2A). Wheel 1 and wheel 3 will be left from the ground.
When the car is on road, conditions often are changing. Sometime road go uphill, sometime go downhill. Sometime wind force on the car may change position of the car. Sometime driver (or passenger) may change his/her posture on seat. All these changes may move centre of gravity of the car away from wheels 2 and 2A. As these changes happened, computerized controller will make sure the car always go back to parallel to the ground, centre of gravity of the car is always on wheels 2 and 2A. How to achieve this?
For sample: Some changes happened on the car, the centre of gravity is moved backward, the distance from the ground to sense radar 1 becomes longer, the controller will order motor 5 to move the board forward, centre of gravity of the car also is moved forward, the weight of load will push front part of the car down, to make sure the distances between both sense radars and the ground are same, centre of gravity is on wheels (2, 2A), the car is parallel to the ground.
Sometime road goes uphill, in this case, distance between the ground and sense radar 2 becomes longer, the controller 6 will order motor 5 to move board 7 to a point, at this point, centre of gravity of the care is on wheels (2, 2A), and also the distances between both sense radar (20, 21) are same, to make sure the car is parallel to the ground (even goes uphill). Because the distance from the ground and both radars (20, 21) always is adjusted by the computerized system to same, we can say, the car is running parallel to the ground (whatever road condition changes). We also can say centre of gravity of the car is always on wheels (2, 2A).
When the car is slowed down or road condition is not good, the driver can switch off computerized controller. In this case, the car will run on 3 wheels — on wheels (1, 2, 2A) or on wheels (3, 2, 2A), the car will move steadily on the ground. When the car is parked, it also sits on three wheels to make sure it is steady on the ground.
Because wheels (2, 2A) are powered by engine, the car can be turned 180 degrees at same place by wheel 2 and wheel 2A being rotated in opposite direction (Fig 4). The car also can be turned 180 degrees by wheel 2 is stopped, wheel 2A is rotated, or wheel 2A is stopped, wheel 2 is rotated. The car can make a U-turn at same place on the ground. If the car is parked near kerb of pavement, it can turn itself away from the kerb only needs very little extra spaces in front and at back.
When the driver switched on the computerized control system, the car will be parallel to the ground steadily, whatever the car is moving or stopped. By this way, the car can cut wheel friction, reduce noise, increase speed and use less energy.
All adjusted movements on the car (described here), such as: Distances changes between the ground and both sense radars, movemnt of centre of gravity, distance wheels (1 or 3) is left from the ground, are actually very small (about 0.5-5mm will be enough). The driver and massengers may not feel the changers when the car is running.
As I know, on some cars, there are “Parking Radars” installed in front and at back already, these radars may be used on this system.
To make the design simpler and cut manufacturing cost, the sense radars can be replace by detecting needles (maybe with little wheels). When a needle touchs the ground, the pressure on the needle will be detected and send signal to computerized controller, and order motor to move the board, to make sure both needles do not touch the ground. In this case, the car is parallel to the ground, only wheels (2, 2A) touch the ground. These detecting needles maybe included inside wheels (1 and 3

More Stories
Essential Features to Look for in ADAS Calibration Systems
Your Guide to Filing a Car Accident Claim
Steps to Take Immediately After a Car Accident